Overview
About AI Robot
AI Robot is a framework an implementation of an AI assisted robot running on Raspberry Pi 5 with Hailo AI Hat
The framework provides autonomous control over robot hardware with an I2C based controller.
Example hardware: Yahboom Robot Expansion Board
These pages describe the main components of the architecture.
AI Robot Behaviour
The aim of the architecture is to provide both high and low level control over the robot's functions and behaviour.
At a low level, this means interfacing with hardware components such as the camera and Python libraries such as the libraries supporting the Hailo AI Hat.
At a high level this means controlling what the robot does in response to low level events and telemetry.
The Hardware
The AI Robot framework is architected to abstract the hardware through the use of classes base on the Node class. The same class is used to control all high level behaviours and acts as the basis for handling something and informing other node of telemetry, low and high level events.
At the hardware level, nodes have been implemented to support robotic hardware based on the I2C bus (note: some devices such as the Camera are supported through libraries on the base controller).
For more about I2C on the Raspberry Pi, see https://www.raspberrypi.com/documentation/computers/raspberry-pi.html
The current implementation of AI Robot is designed to work against a rover type robot, specifically the Yahboom Raspbot V2 - note: this robot ships with the ROS2 Robotic Framework which is not used in this implementation.
This robot uses a Raspberry Pi 5 as the base controller. In the examples given, the Raspberry Pi has been extended with a Waveshare UPS Hat (E) and Hailo AI Hat+.
Here is the robot:

- Raspberry Pi 5
- Yahboom Robot Expansion Board
- Hailo AI Hat+
- Yahboom Raspbot V2
- Waveshare UPS Hat (E)
- Bluetooth Speaker so we can hear her speak!
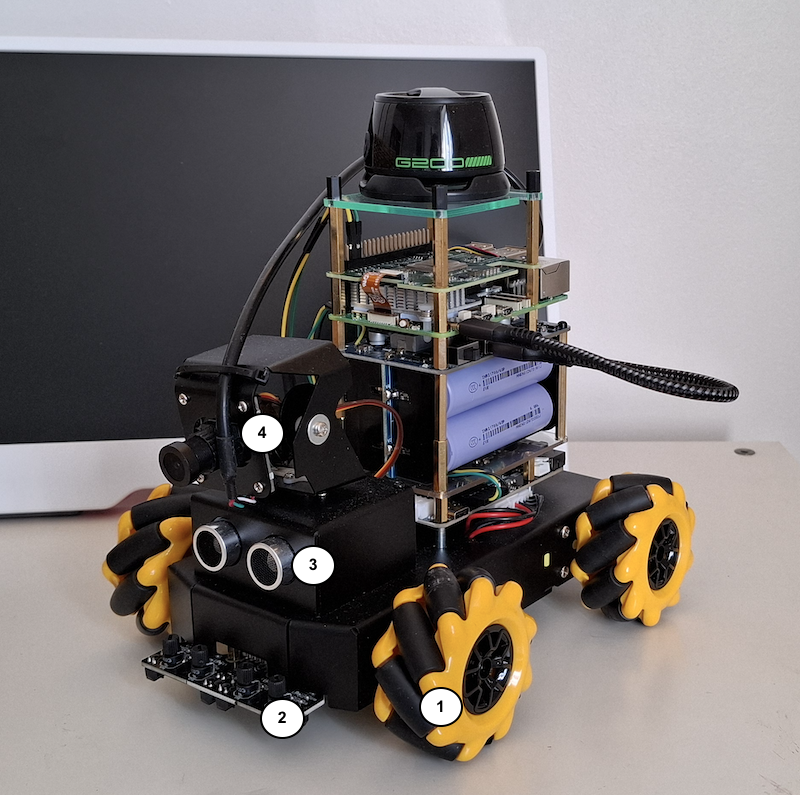
- Mecanum Wheels
- Four-way Patrol Module
- Ultrasonic Sensor Module
- USB Camera and PWM Servos